欢迎访问湖北航安智能科技有限公司网站!
.jpg)
- product -
机器人装车方案(单机)
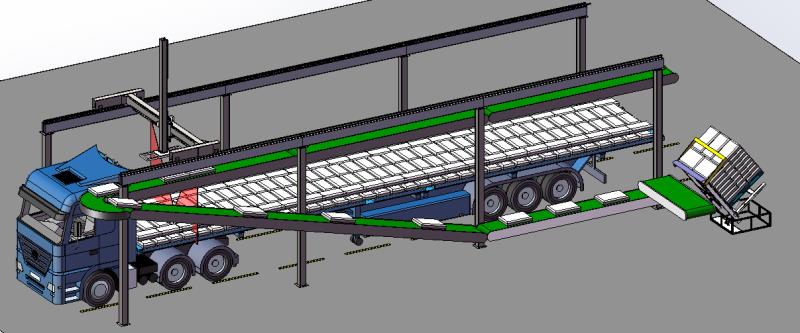
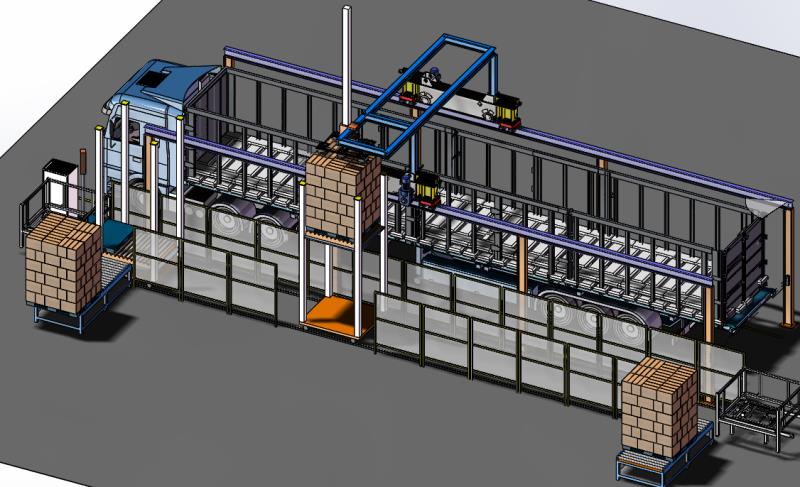
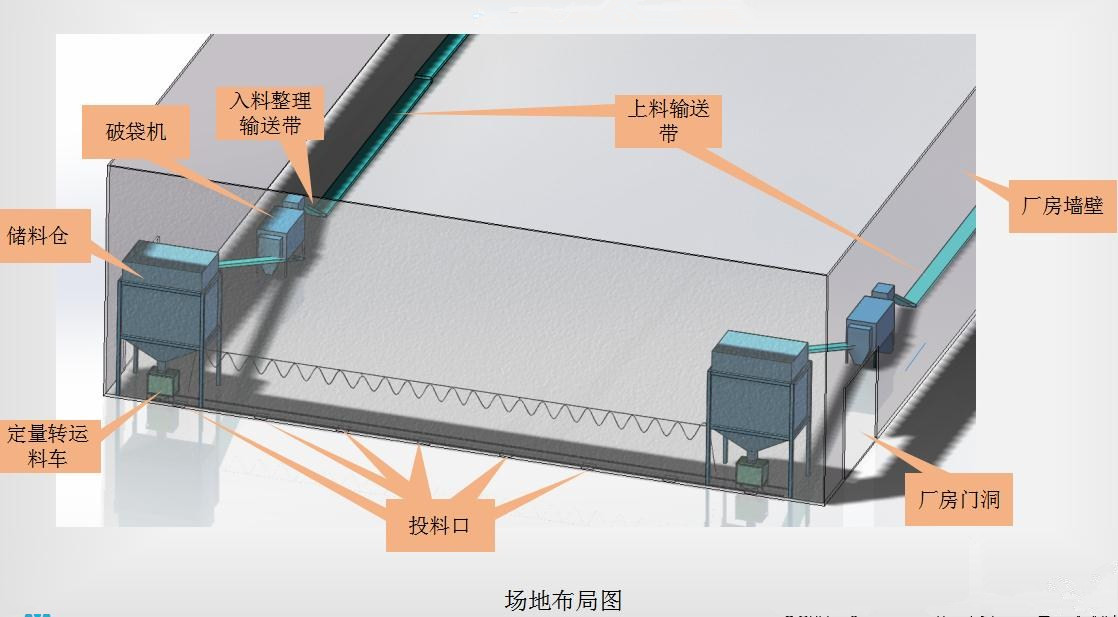
整体布局
方案简介:
本方案采用龙门式轨道和进口六轴机器人进行装车码垛。停车采用定位传感器辅助,工业视觉系统..定位车厢,然后进行快速装车。
驾驶员可自选车型和装货量,然后系统根据车型自动生成装车程序。
装车机参数:
物料的特性:10~50kg编织袋、牛皮袋、纸袋等(可吸附的物料)。
装车速度:900bag/h(不含停车调整时间)。
适应车型:车厢宽≤2350mm,高栏、低栏、平板车型。
设备功率:约25kw。
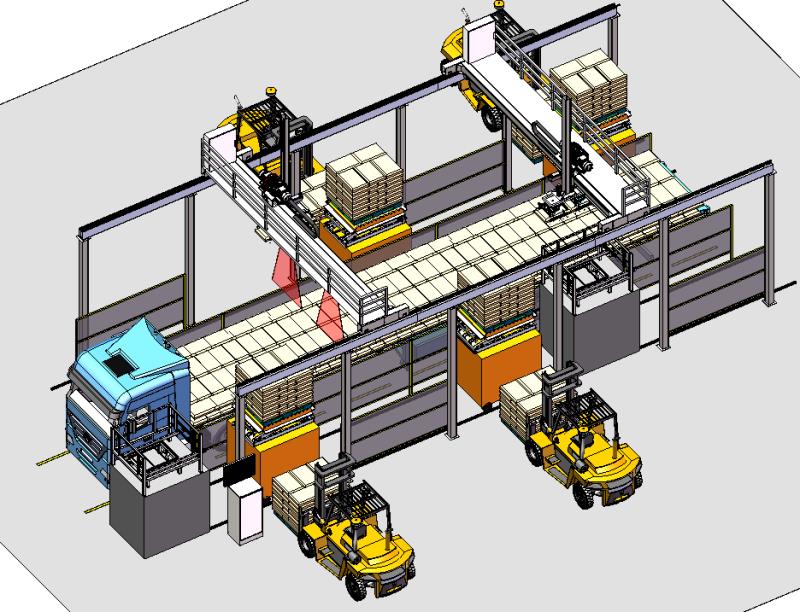
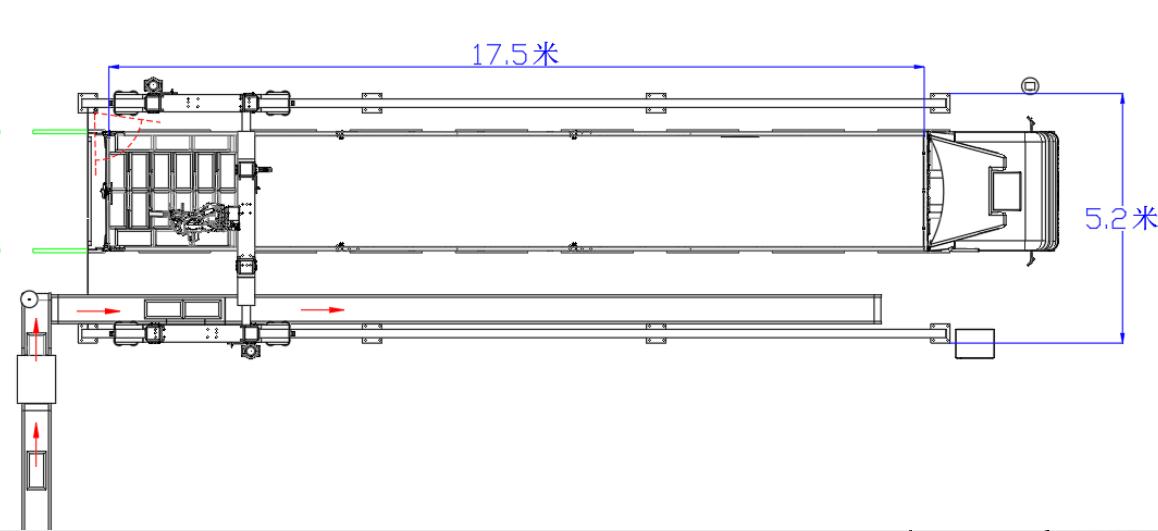
平面布局图
分部介绍
一、车辆停车:
说明:
车辆按红色箭头方向、沿地标线往前驶入装车区;
驶入过程中逐渐减速,经过多个定位传感器(每个定位传感器对应一个停车指示灯),每经过一个传感器熄灭一个指示灯。
驾驶员根据指示灯判断车辆现在所处的位置,当.后一个指示灯熄灭时,车完全停止。
二、车厢*定位:
车辆停车后,在控制柜处选择相应车型和装货量,系统会自动生成装车程序;
视觉传感器扫描车厢,以车厢角为原点,车厢两边为轴线,计算确定坐标系,机器人根据坐标系开始装车。
三、物料输送:
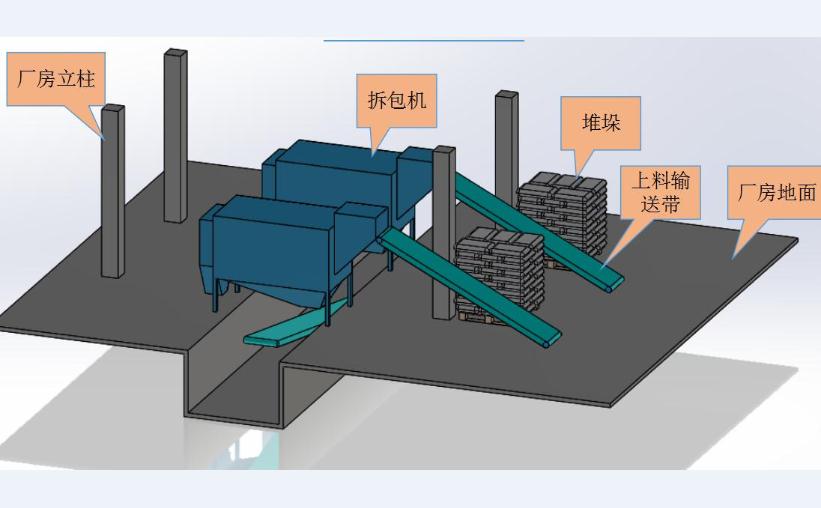
1、由存储仓库里自动拆垛或生产车间生产的袋装物料,经过皮带输送线传送到装车机区域。
2、物料输送到装车区域,经过连续提升机爬升、输送到高层输送线上,然后整理、换向进入码垛区的滚筒输送线。
3、物料到达机器人的抓取位后,通过挡板定位缓存在线体上,输送线上缓存两袋后,机器人开始抓取并装车。
4、滚筒输送线采用积放式滚筒,可以在物料缓存时物料下方的滚筒停止转动,取走后恢复转动。
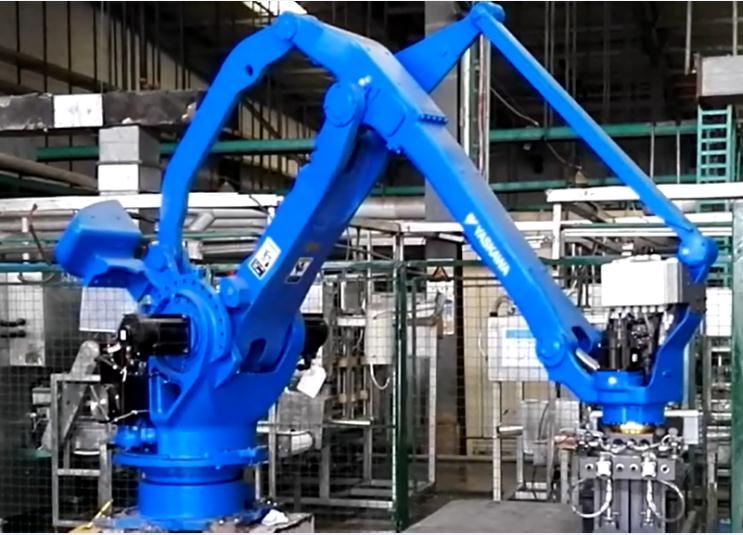
四、装车机器人:
装车机器人采用进口六轴机械手,侧挂在龙门架上,无需左右平移即可满足车厢码放。通过机器人自身周转半径,可以抵达抓取位、车辆箱板.底层,有效提高机器人使用效率。
机器人负载:180kg。动作范围:2.7米 。
五、装车用吸盘夹具:
装车夹具采用双吸盘并列方式,一次抓取两袋物料进行装车,装车速度约7s/2bag,约900bag/h。
拆垛机器人夹具采用海绵吸盘,40%真空抓取力≥750N,空气消耗量7NL/sec(气压6bar),适用于低温-30℃环境。
海绵吸盘对重载大袋拆垛优势:
——抓袋时无需*定位
——极大提高夹具灵活性
——同一吸具可适用于不同袋子尺寸规格
——自带真空发生器,结构紧凑
——更快、更方便的现场调试
——高强度、耐磨损橡胶海绵
——有效降低夹具自重
六、装车流程介绍:
1.抓取位通过传感器检测到缓存两袋后,机器人开始取物料。
2.机器人从抓取位上吸起物料,按照需求码放物料至区域1;
3.在码放区域1.后两袋时,码放过程中机器人开始向区域2移动,可以减少机器人等待抓取的时间,提*率;
4.机器人按设定码放程序依次装完车。
七、拆垛机介绍:
技术参数:
1. 负载:3000KG
2. 拆垛速度:1200袋/小时
3. 垛型尺寸:1600*1800mm
4. 包装袋尺寸:长800~1100mm*
宽400~650mm
5. 托盘栈垛高度:.大1.4米(不包括托盘)
6. 装机容量:5.2kw(平均运行功率约2kw/h)
7. 外形尺寸:长4500mm*宽2360mm*高2700mm
8. 操作方式:按键、触摸屏、遥控
9. 驱动方式:电机(380V) 气动(0.5MPa)
拆垛机特点:
1. 结构简单维修方便,设备采用.常见的通用的标准部件
2. 节能环保,低至每吨料消耗0.05度电
3. 拆垛速度快,速度.快可达1200袋每小时
4. 性价比高,较高的综合性价比使企业能够很快收回投资
5. 操作简单,只需按动启动按钮便可自动拆垛
6. 智能运行,智能分析设备运行各个阶段,具有断点记忆功能,一键式启动,继续断点运行
八、相关参数:
物料特性:10~50kg编织袋、牛皮袋、纸袋等(可吸附的物料)。
装车速度:900bag/h(不含停车调整时间)。
适应车型:车厢宽≤2350mm,高栏、低栏、平板车型。
设备占地:18m(L)×4.8m(W)×6.5m(H)(注:根据需求、用途不同有所变化)。
设备功率:约25kw。
预算报价
湖北航安智能科技有限公司主营工业机器人,自动装车机,自动码垛机,自动拆袋投料机等产品设备,欢迎联系我们进行合作!

返回顶部
 当前位置:
当前位置: